


Qu’est-ce que le “module” d’un pignon d’engrenage ?
Un grand merci à François Thévand pour cette traduction.

Un grand merci à François Thévand pour cette traduction.
Cet article est une reprise du message créé par “Jipe” : Interface homme / machine – Généralités – Forum Le Bear CNC Le PC portable qui pilotait ma CN étant tombé en panne j’ai dû trouver une solution de remplacement, je vous propose de développer la mise en place de ma nouvelle interface. 1- Recensement
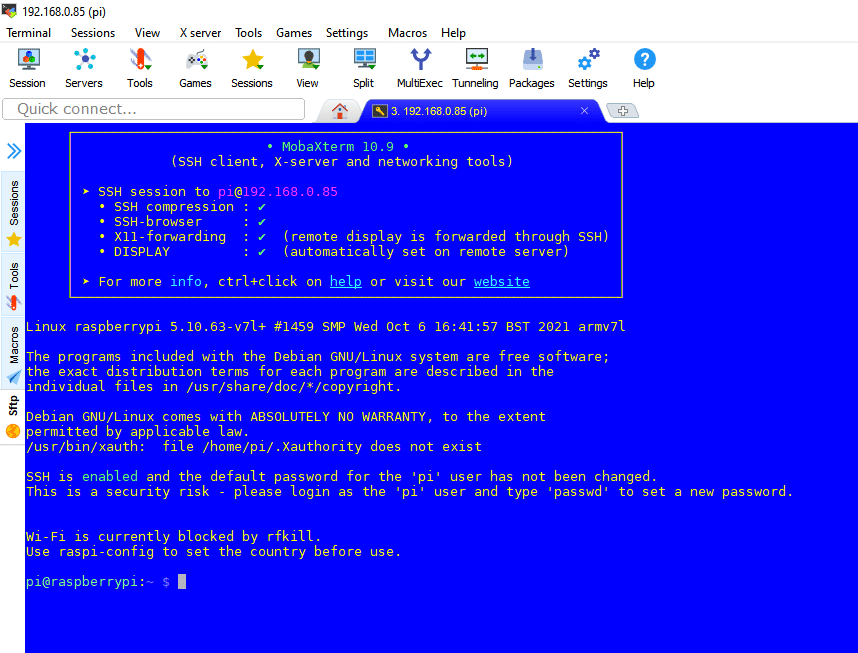
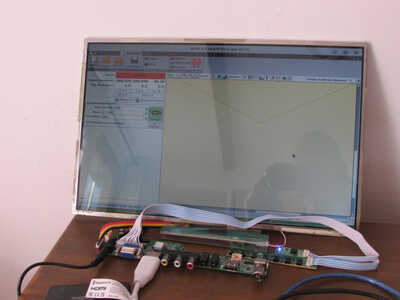
Il arrive très souvent de vouloir piloter sa CNC indépendamment de son PC. Une alternative bon marché est d’utiliser un Raspberry Pi (Abrévié en RPi pour la suite), sur lequel on va pouvoir se connecter à distance, où localement en lui adjoignant écran et clavier. Nous allons considérer une installation sans écran ni clavier, solution
Beaucoup se demandent si RosettaCNC ne peut être acheté que par ceux qui ont un numéro de TVA ou s’il est possible pour un amateur d’avoir un devis et d’acheter le produit car il n’y a pas de boutique directe en ligne sur le site Web du fabricant. La réponse est OUI, tout le monde

Dans l’article précédent, nous avons vu comment installer le logiciel de contrôle de la carte RosettaCNC, connecter la carte au PC ou au réseau, configurer l’adresse IP de la carte et effectuer la première connexion, qui est également nécessaire pour déverrouiller la licence du logiciel de contrôle. Maintenant, avant de procéder à la description du

Le transporteur vient de livrer le colis avec la nouvelle carte RosettaCNC que nous avions commandée quelques jours auparavant: Une fois le rituel de déballage effectué, la première question qu’un nouvel utilisateur se posera est : « Quelle est la prochaine Etape ? « Simple, allumons-la et essayons de la connecter au PC. Pour commencer, voici la
Il est assez logique d’utiliser au moins 2 sondes différentes avec une machine CNC. L’une pour la hauteur de Z, voire le point 0 des coordonnées de travail avec une sonde XYZ (ou une sonde 3 D), l’autre pour mesurer la longueur d’outil, plus exactement la différence de longueur (sonde TLO). Seulement, si on bascule
Présentation Le but est d’avoir un interrupteur momentané, installé fixement sur la machine, qui va permettre de comparer et mesurer la longueur de la fraise, de manière à n’avoir besoin de faire la mise au point du Z=0 sur la pièce une seule fois, quel que soit le nombre d’outils différents utilisés pour un même
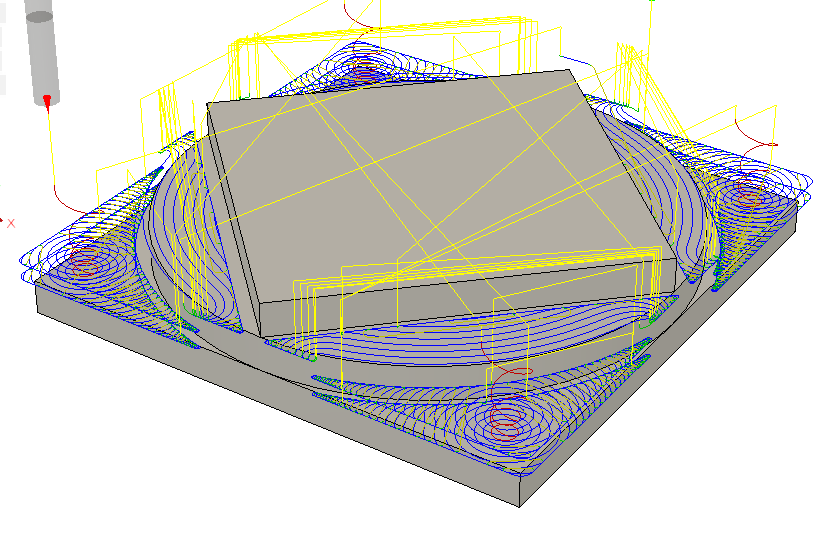
Vous avez une machine CNC, et vous utilisez Fusion 360 pour concevoir vos pièces. Le truc, c’est que les 2, séparément, marchent très bien (enfin, j’espère pour vous 😉 ). Là où les choses se compliquent un peu, c’est au moment de choisir les stratégies d’usinage 2D et 3D dans l’atelier Manufacture de Fusion 360.
En remerciement à tout ceux qui sont mes patrons depuis déjà quelque temps, je vous mets en download le fichier F3D correspondant à l’étape finale de ce projet. La liste des vidéos est ici: https://www.youtube.com/playlist?list=PL0qHSH9_1qY6jR5WaFSh301FLFfPCmOF Le fichier a télécharger est ici: https://lebearcnc.com/wp-content/uploads/2019/06/Gabarit-v45.f3z
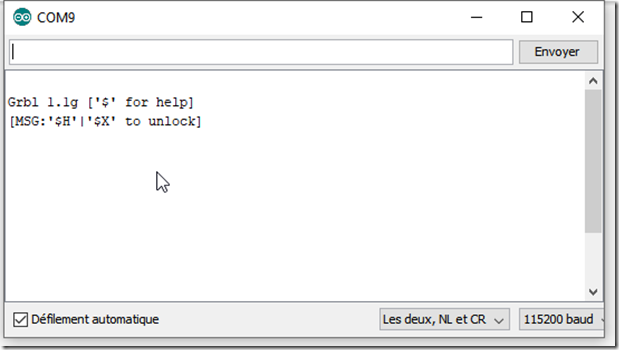
Comment installer la dernière version de GRBL sur un Arduino Uno: c’est une opération familière pour ceux qui “bricolent” un peu avec un Arduino, mais pour de nombreux amateurs de CNC, c’est encore de la magie noire…. Rien de bien compliqué, pourtant, comme nous allons le montrer dans cet article. Ce dont vous avez besoin:
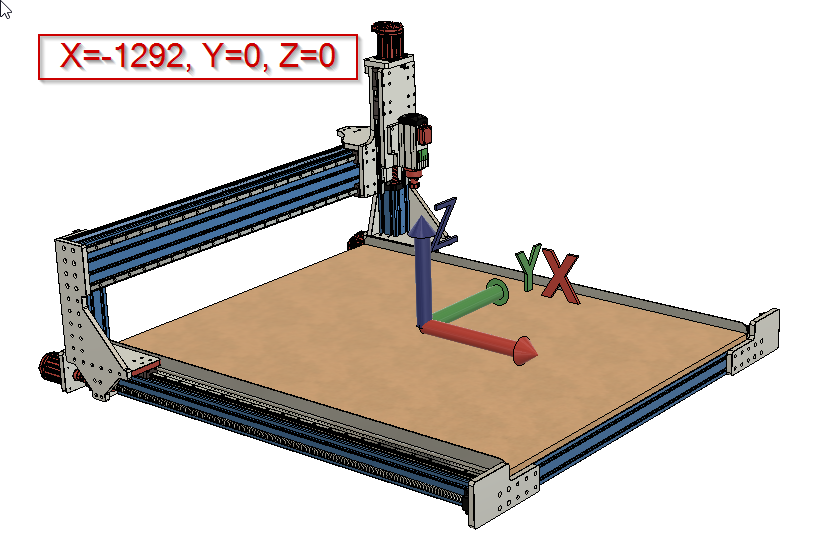
Homing est la fonction qui permet de donner une position de référence sur les 3 axes de la machine, de manière à ce qu’un certain nombre d’opérations soient possibles grâce à un “repère” physique constant, tel que la position de brides et d’attaches, d’une sonde, etc…. La position de ce repère sur la machine dépend
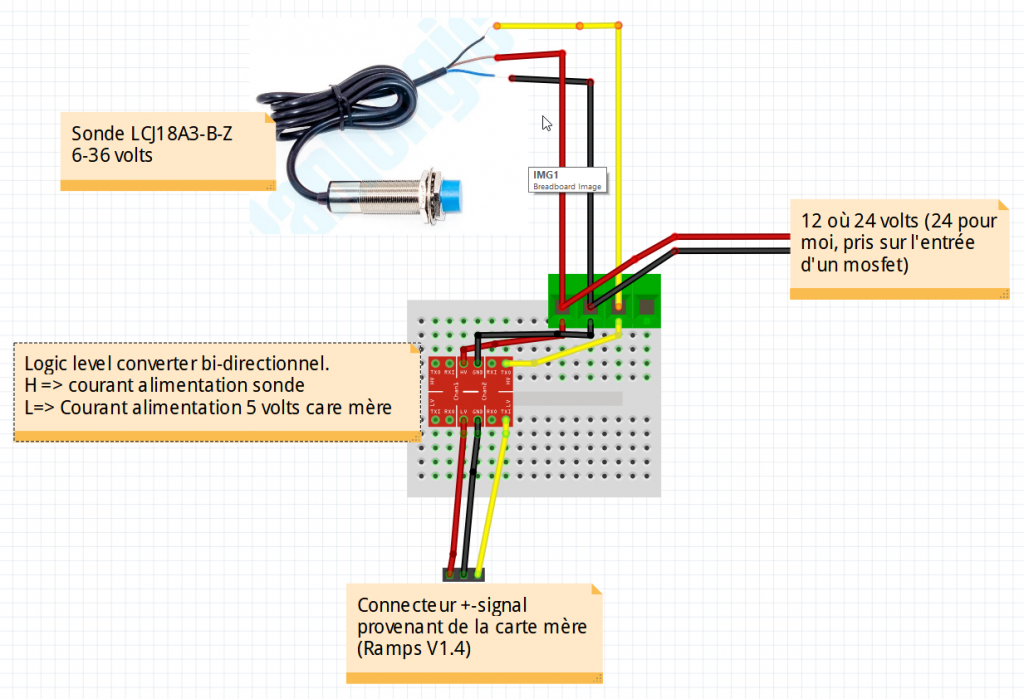
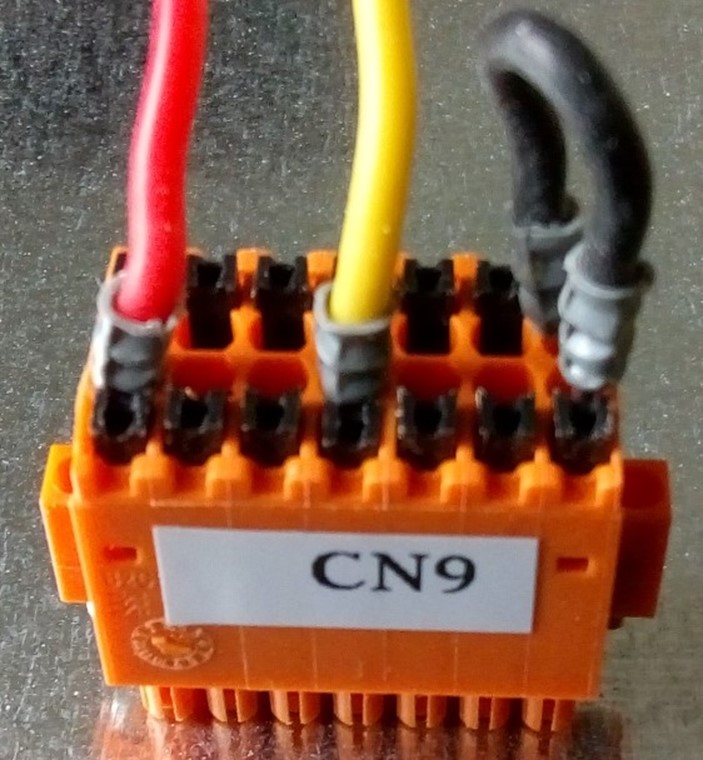
Je ne sais pas pour vous, mais l’ajout d’une sonde (inductive où capacitive), alimentée en 12 volts (où plus) est toujours un petit casse-tête. Une recherche internet amène toute sorte de réponses, généralement basée sur des résistances pour abaisser la tension de 12 volts vers 5 volts (en fait, ce devrait être 4.8 volts). On
Vous avez une machine CNC, et vous utilisez Fusion 360 pour concevoir vos pièces. Le truc, c’est que les 2, séparément, marchent très bien (enfin, j’espère pour vous 😆 ) La où les choses se compliquent un peu, c’est au moment où il faut utiliser l’atelier Manufacture de Fusion 360 pour sélectionner les chemins d’outils
Ceux qui regardent régulièrement les vidéos de la chaîne Le Bear CNC ont vu apparaître depuis quelque temps une sorte de générique de fin. Il s’agit en fait de remercier les généreuses personnes qui ont fait le geste de s’engager, avec Patreon, à contribuer financièrement au développement des activités de partage de connaissances, faites à
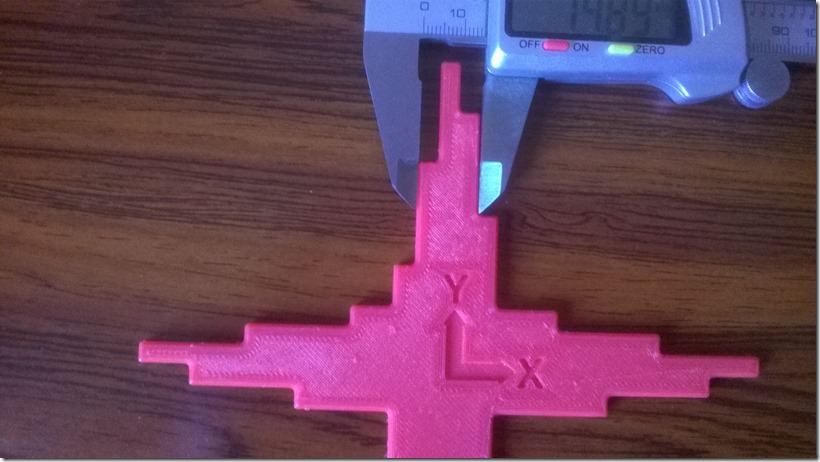
Ces sujets reviennent tout le temps sur les divers groupes traitant de l’impression 3D, et les réponses se trouvent éparpillées dans plusieurs dizaines, pour ne pas dire centaines, de messages, qu’il faut ensuite trier pour trouver celles qui correspondent réellement aux bonne méthodes nécessaires à la calibration et aux réglages d’une imprimante 3D. Bien sûr,

Depuis que j’ai découvert Fusion 360, en dehors d’apprendre à me servir de l’outil, je m’y suis surtout intéressé pour sa capacité à générer du G-Code d’usinage directement. Mais l’impression 3D avec Fusion 360 est aussi une fonctionnalité très pratique, et c’est de cela dont nous allons parler aujourd’hui, pour changer! Si l’on est actif

De l’idée de départ jusqu’à la fabrication de la pièce sur votre machine CNC, tout va se passer sur l’ordinateur, utilisant différents logiciels selon l’étape du processus à effectuer, constituant ainsi une chaîne logicielle. LA Chaîne logicielle, dans l’absolu, n’existe pas. Il y a la vôtre, celle que vous allez petit à petit adopter, qui

Traduit et adapté de l’original chez PreciseBits La première question que la plupart des gens posent lors de l’utilisation d’outils au carbure pour couper du bois (et autres matériaux tendres) pour la première fois est: “Quelles sont les meilleures vitesses d’avance et de rotation“. Ce qu’ils veulent réellement savoir est: “Jusqu’à quelle vitesse je peux

Traduit et adapté de l’original chez PreciseBits Sélectionner une vitesse de broche appropriée (T/Mn), correcte, à utiliser pour couper n’importe quel matériau avec un outil rotatif, a toujours été une sorte de challenge. Même avec l’arrivée de grandes bases de données de référence sur les matériaux, et des outils exceptionnels comme le GWizard Calculator de CNCCookBook.com,















